Ein BLDC-Motor besteht aus zwei Hauptteilen, einem Stator und einem Rotor. In dieser Darstellung ist der Rotor ein Permanentmagnet mit zwei Polen, während der Stator aus Spulen besteht, die wie im Bild unten gezeigt angeordnet sind.
Funktionsweise
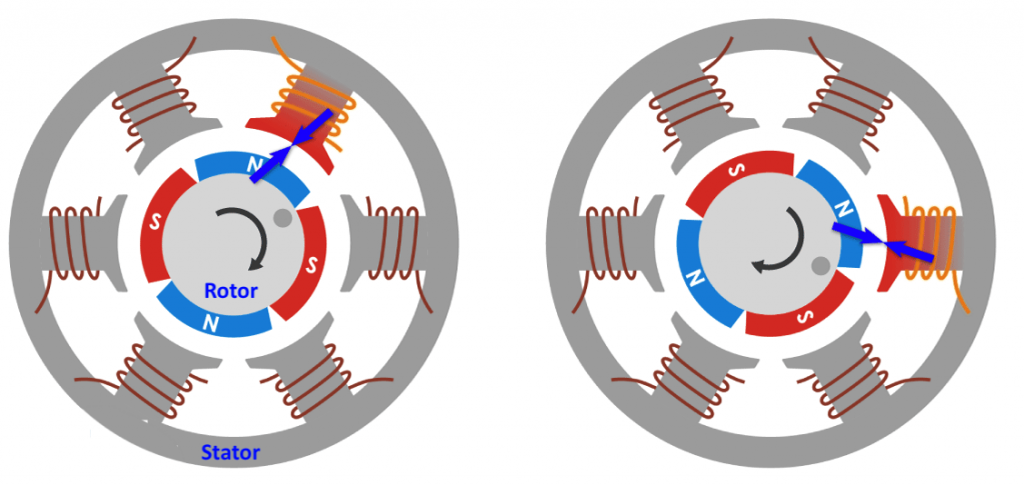
Die Funktionsweise ist analog zu einem klassischen Motor. Sobald Strom durch die Spule fliesst, entsteht ein Magnetfeld, dessen Pole von der Richtung des Stroms abhängt. So dass je nach der Stromrichtung an der Spule ein anziehendes oder abstossendes Magnetfeld erzeugt werden kann.
Wird nun jede Spule nacheinander so angesteuert, dass die entstehende Kraftwirkung zwischen Stator und Rotor eine Drehwirkung erzeugt haben wir einen Motor.
Um die Effizienz des Motors zu erhöhen, können wir zwei gegenüberliegende Spulen als einzelne Spule so wickeln, dass entgegengesetzte Pole zu den Rotorpolen erzeugt werden, wodurch wir eine doppelte Anziehungskraft erhalten.
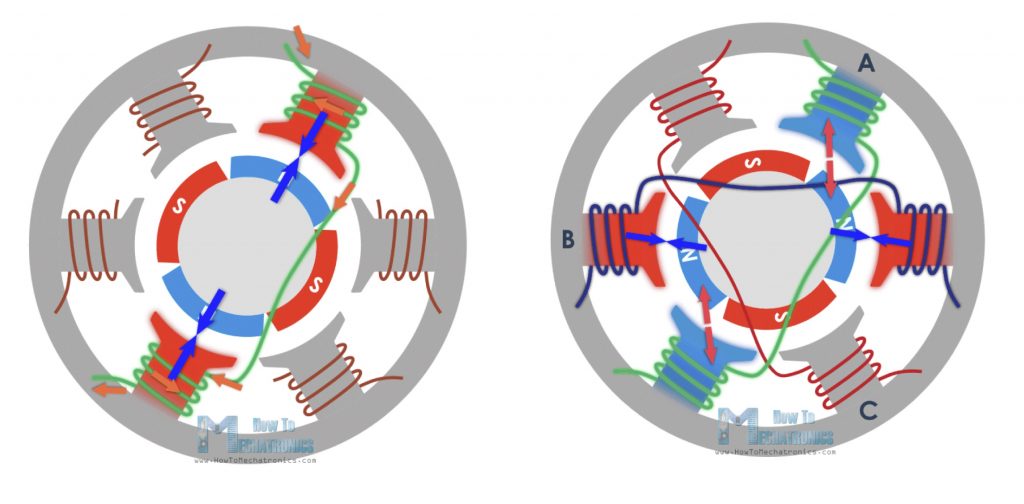
Mit dieser Konfiguration können wir die sechs Pole am Stator mit nur drei Spulen oder Phase erzeugen. Wir können den Wirkungsgrad weiter steigern, indem wir zwei Spulen gleichzeitig bestromen. Auf diese Weise wird eine Spule den Rotor anziehen und die andere Spule abstoßen. Damit ist leicht abzulesen, dass für eine 360 Grad Drehung des Rotors sechs Schritte erforderlich sind:
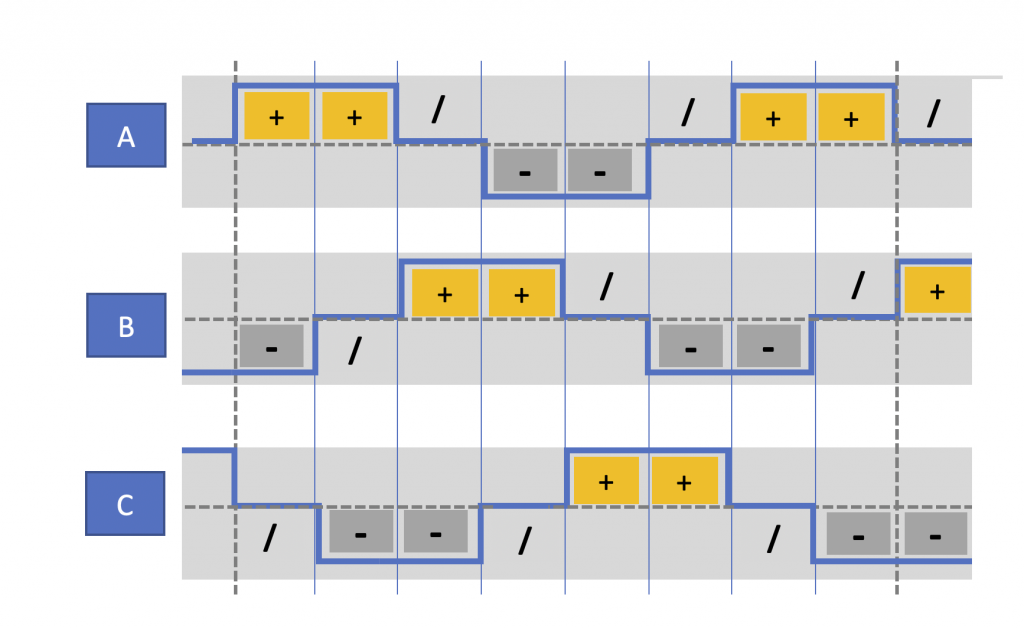
Wenn wir uns die Stromwellenform ansehen, können wir feststellen, dass in jedem Intervall eine Phase mit positivem Strom, eine Phase mit negativem Strom und die dritte Phase ausgeschaltet ist. Dies ergibt die Idee, dass wir die freien Endpunkte jeder der drei Phasen miteinander verbinden und so den Strom zwischen ihnen aufteilen oder einen einzelnen Strom verwenden können, um die beiden Phasen gleichzeitig zu erregen.
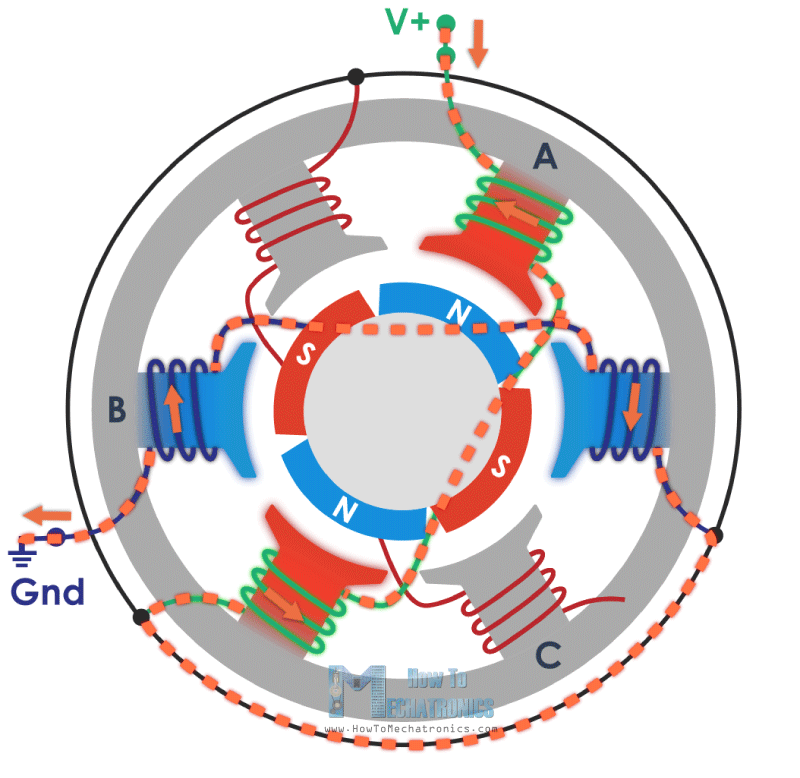
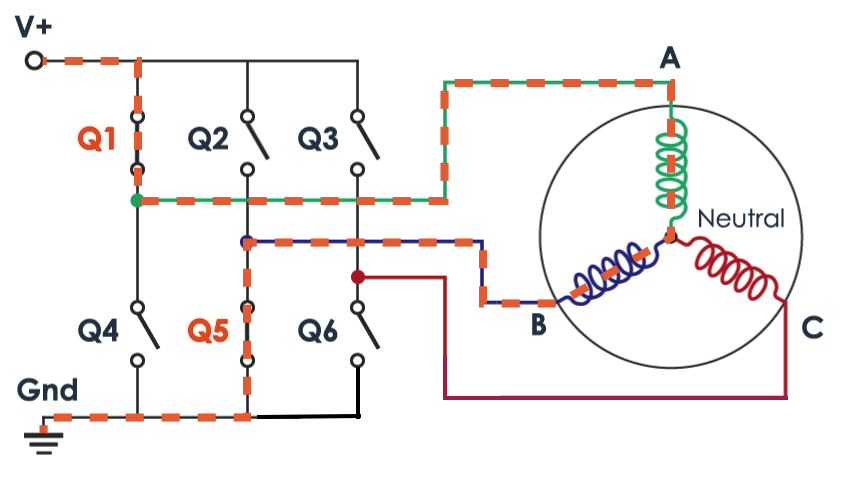
Hier ist ein Beispiel. Wenn wir im obigen Beispiel Phase A mit einer Art Schalter, zum Beispiel einem MOSFET, an die positive Gleichspannung anschließen und auf der anderen Seite die Phase B mit Masse verbinden, dann fließt der Strom von VCC durch Phase A, den Sternpunkt und Phase B, an Masse. So erzeugten wir mit nur einem einzigen Stromfluss die vier verschiedenen Pole, die den Rotor in Bewegung setzen.
Bei dieser Konfiguration haben wir tatsächlich eine Sternschaltung der Motorphasen, bei der der Sternpunkt intern verbunden ist und die anderen drei Enden der Phasen aus dem Motor herauskommen, und deshalb kommen beim bürstenlosen Motor drei Drähte heraus.
Damit der Rotor den vollen Zyklus macht, müssen wir nur die richtigen zwei MOSFETS in jedem der 6 Intervalle aktivieren und genau darum geht es bei ESCs. Ein ESC (=elektronischer Geschwindigkeitsregler) steuert die Bewegung oder Geschwindigkeit des bürstenlosen Motors, indem er die entsprechenden MOSFETs aktiviert, um das rotierende Magnetfeld zu erzeugen, damit sich der Motor dreht. Je höher die Frequenz oder je schneller der ESC die 6 Intervalle durchläuft, desto höher ist die Drehzahl des Motors.
Ansteuerung mit einem Steuergerät
Es gibt verschiedene elektronische Steuergeräte im Internet. Hier soll an einem Beispiel gezeigt werden, wie damit ein ausgedienter Elektro-Rasenmäher-Motor angesteuert werden kann.
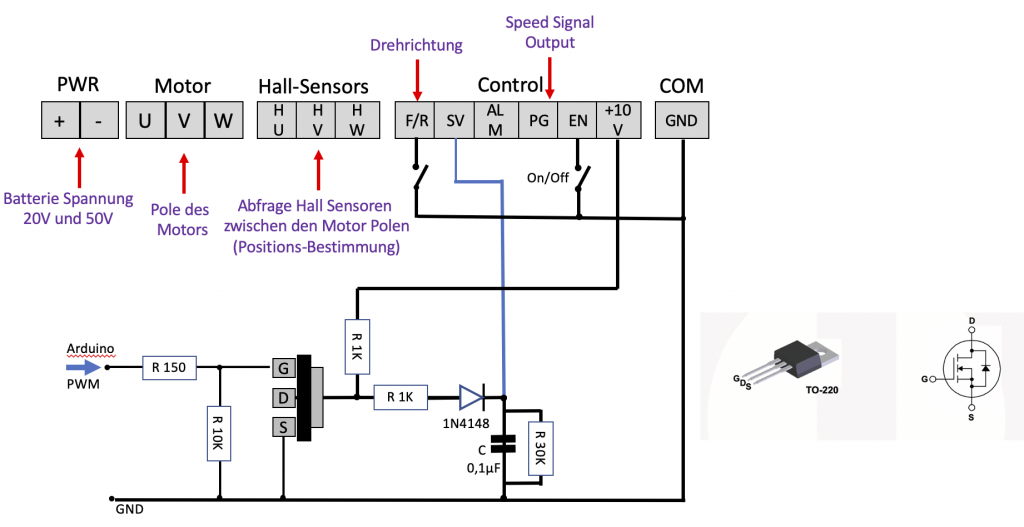
Das mir vorliegende Gerät mit der Bezeichnung WS55-220 kommt von einem chinesischen Hersteller ohne weitere Erklärungen. Es hat mehrere Anschlüsse die wie folgt gekennzeichnet sind:
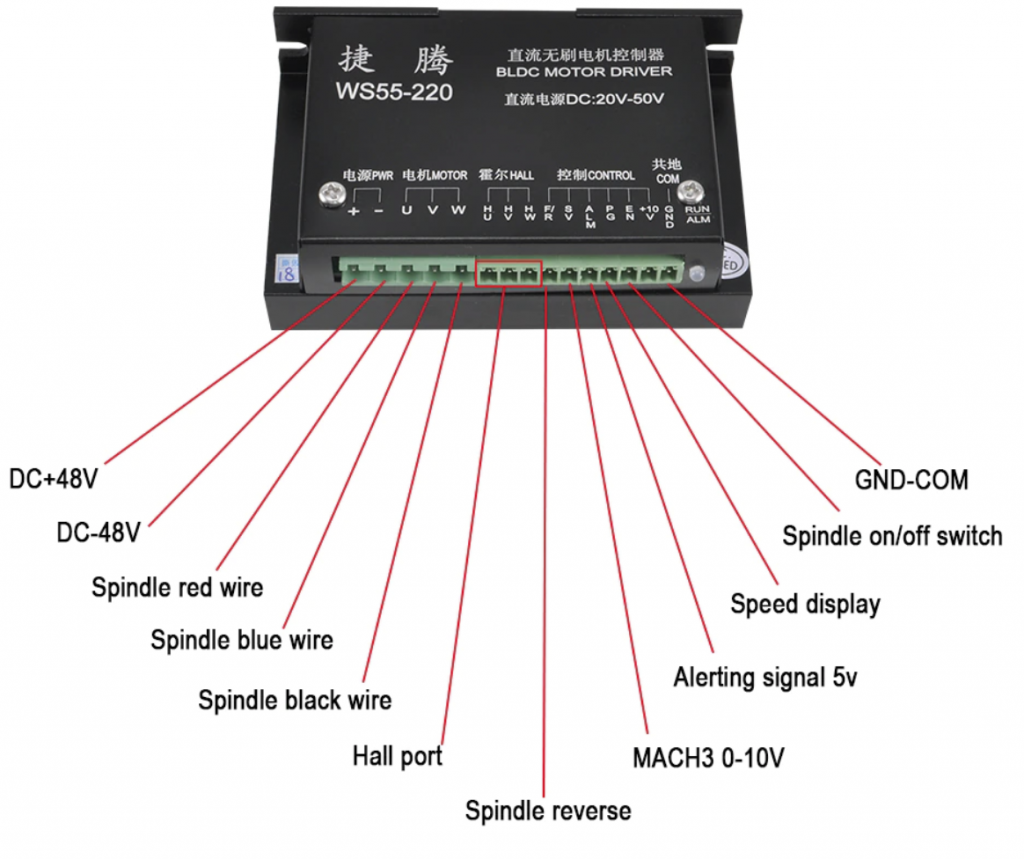
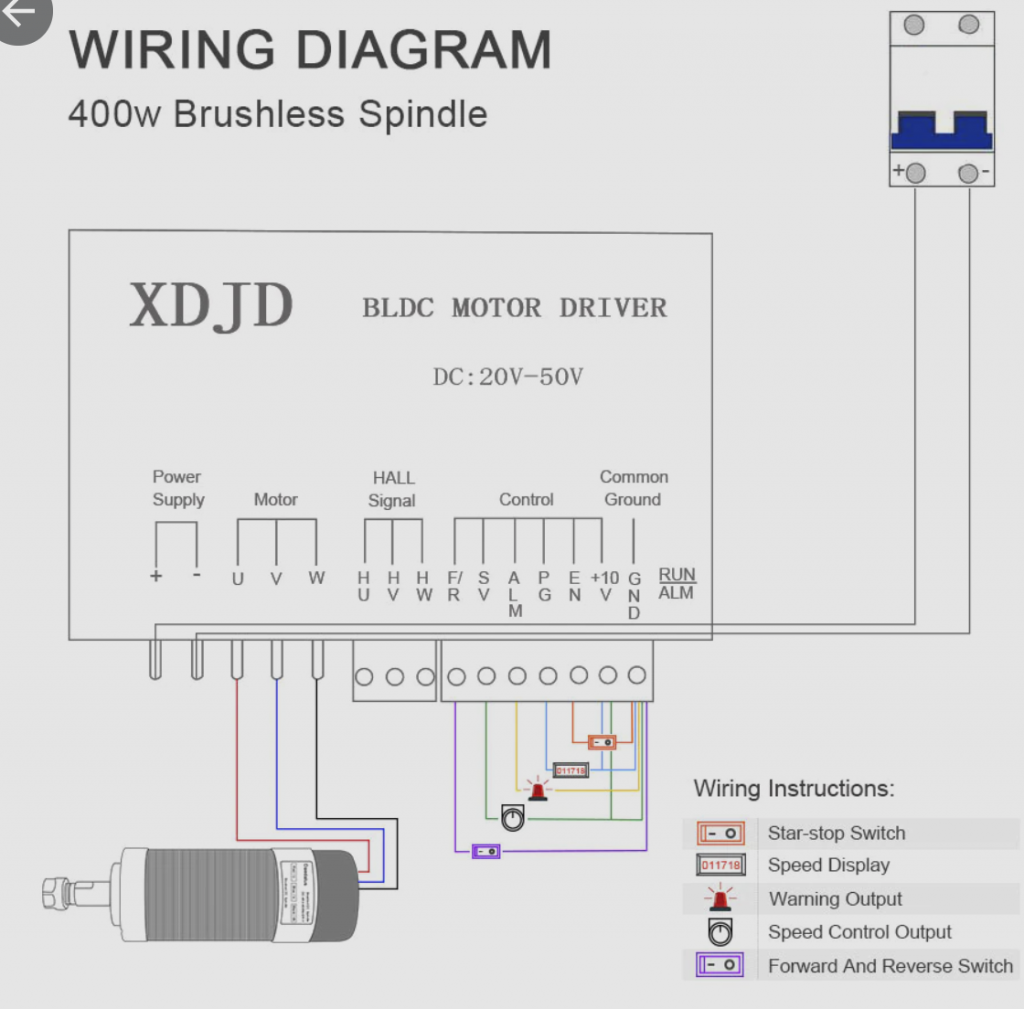
Daneben finden sich weitere Bilder im Internet, aus denen eine mögliche Beschattung hervorgeht:
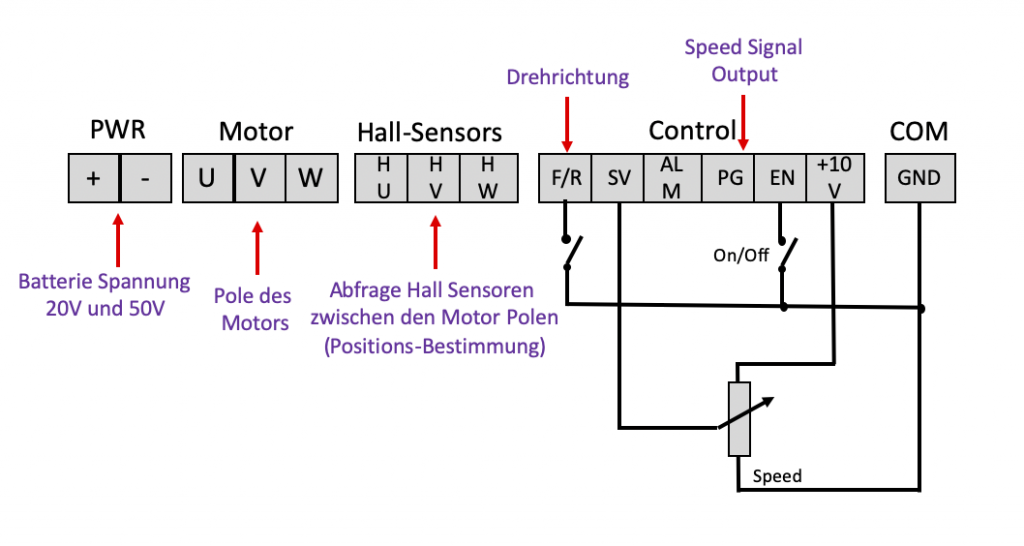
Meine eigenen Untersuchungen haben nach einigem Suchen dann auch zu der Erkenntnis geführt, dass die Steuersignale sich alle auf Masse beziehen und dann zu folgendem Schaltbild geführt.
Ansteuerung über einen Arduino
Möchte man die Ansteuerung anstelle des meist mit gelieferten Potentiometer mit einem Microcontroller durchführen, so muss die Spannungsteilung des Potentiometers durch einen MOSFET Transistor übernommen werden, der über ein PWM Signal angesteuert wird.
Aus dem obigen Prinzipschaltbild geht hervor, dass vom Controller eine Steuerspannung von +10V die über das Potentiometer an den Eingang SV geführt wird. Aus diesem Grund liegt der Ansatz nahe, eine typische MOSFET Motor-Ansteuerung herzunehmen und anstelle des Motors die Anschlüsse SV und +10V zu verwenden.
Das zugehörige Test-Programm sieht so aus:
/*
* Test-Programm für den Arduino UNO
* PHOF Okt 2021
* PWM Signal 255 = Motor Aus / 0 = Motor full speed
*
*/
int analogPin = 9; // PWM output to Input Gate of Mosfet
int i;
void setup(){
Serial.begin(115200);
}
void loop(){
for (i=255; i>0;i=i-5){
Serial.print("Value is:");
Serial.println(i);
analogWrite(analogPin, i); // PWM out from 255 to 0 for Speed Control
delay(3000);
} //end for
}//end loop